Le origini del programma e la nascita del Tomcat
Quando il programma F-111B si rivelò inadatto alle esigenze operative della US Navy, i progettisti della Grumman si trovarono di fronte a una delle sfide più complesse dell’intera Guerra Fredda. La Marina statunitense aveva bisogno di un velivolo capace di decollare da una portaerei, intercettare bombardieri sovietici a grandissima distanza, trasportare un armamento pesante e mantenere prestazioni elevate anche in combattimento ravvicinato. Requisiti apparentemente incompatibili che portarono alla nascita dell’F-14 Tomcat, un caccia destinato a diventare una delle macchine più sofisticate mai costruite per l’impiego aeronavale.
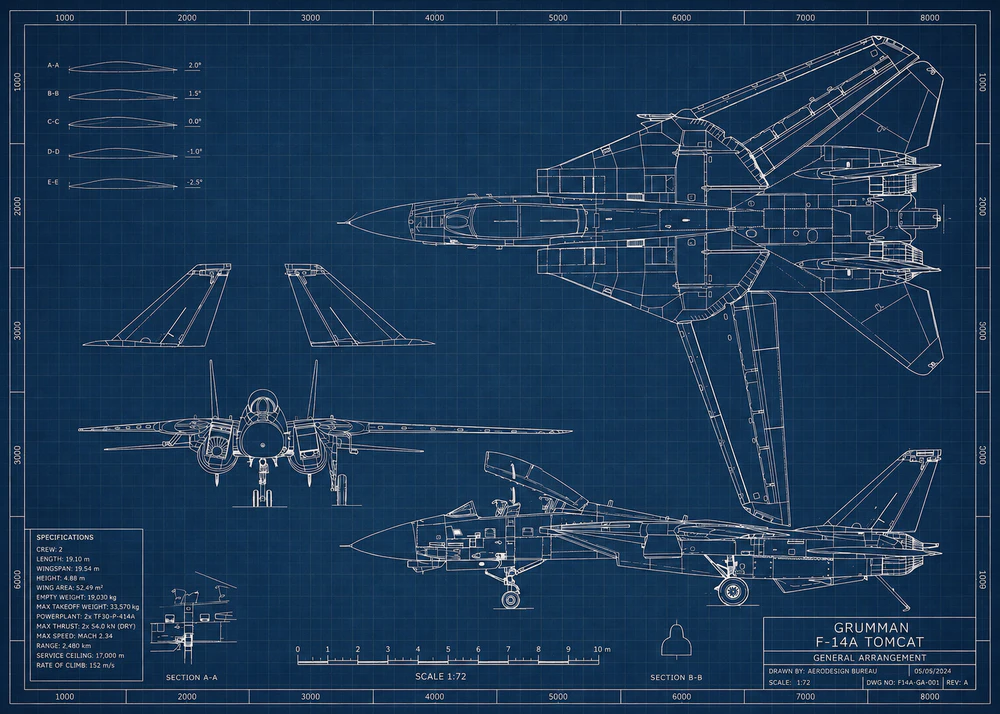
Entrato ufficialmente in servizio nel 1974, il Tomcat rappresentava una sintesi straordinaria tra aerodinamica avanzata, elettronica di bordo e robustezza strutturale. Lungo oltre 19 metri e progettato per operare in uno degli ambienti più ostili immaginabili, il ponte di una portaerei, il velivolo doveva resistere per anni a violente accelerazioni, impatti in appontaggio e continue esposizioni all’ambiente marino. Ogni elemento della sua struttura venne progettato tenendo conto di questi vincoli estremi.
L’ala a geometria variabile: la soluzione a un problema impossibile
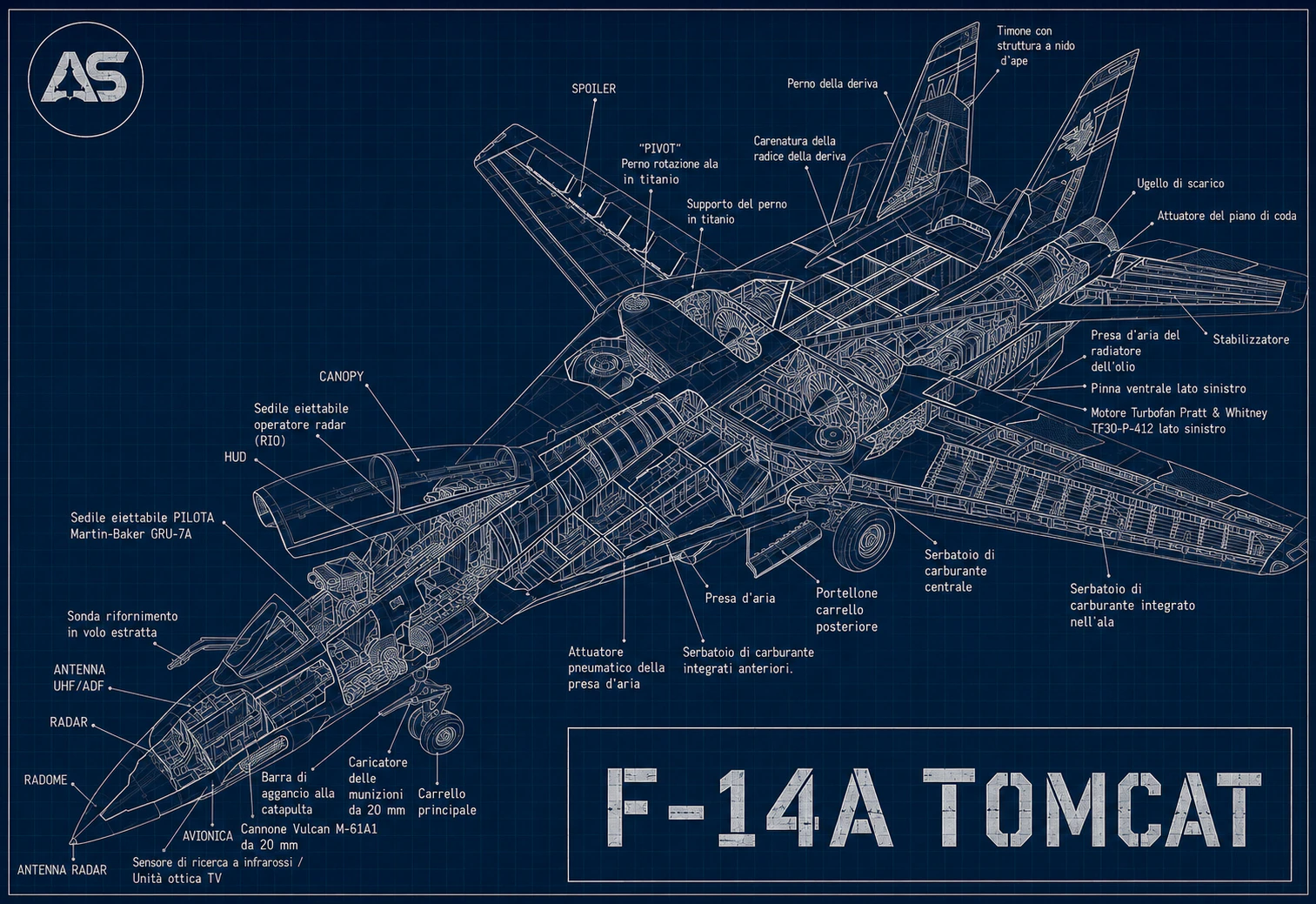
Osservando i blueprint originali della Grumman emerge immediatamente l’elemento che rese celebre il Tomcat in tutto il mondo: l’ala a geometria variabile. Negli anni Sessanta gli ingegneri si confrontavano con un dilemma apparentemente irrisolvibile. Un’ala ideale per il decollo e l’atterraggio è ampia e poco inclinata, mentre un’ala ottimizzata per il volo supersonico richiede una forte freccia per ridurre la resistenza aerodinamica. L’F-14 cercò di avere entrambe le configurazioni nello stesso velivolo.
Con le ali aperte a 20 gradi, il Tomcat sviluppava la massima portanza possibile, caratteristica fondamentale durante le operazioni di decollo e appontaggio. In questa configurazione il velivolo risultava stabile anche a basse velocità e poteva sfruttare al meglio la limitata lunghezza del ponte di volo. Durante la crociera e il combattimento ad alta velocità, il sistema arretrava progressivamente le ali fino a raggiungere i 68 gradi, riducendo la resistenza e consentendo di superare Mach 2,34, equivalenti a oltre 2.400 km/h ad alta quota.
Clicca per ingrandire
Esisteva infine una quarta configurazione poco nota al grande pubblico ma fondamentale per la vita operativa sulle portaerei. A terra, le ali potevano essere portate a 75 gradi in modalità Oversweep, ripiegandosi all’indietro fino a sovrapporsi parzialmente ai piani di coda. Questa soluzione riduceva drasticamente l’ingombro del velivolo, permettendo di movimentare un numero maggiore di aeromobili negli spazi estremamente limitati degli hangar navali.
I pivot in titanio e il sistema di movimentazione alare
Dietro il movimento delle ali si nascondeva una delle soluzioni meccaniche più impressionanti mai installate su un caccia. Contrariamente a quanto spesso si pensa, le ali non scorrevano lungo binari o guide, ma ruotavano attorno a giganteschi perni strutturali in titanio denominati pivot. Questi elementi erano collocati nella sezione centrale della fusoliera, all’interno del cosiddetto guanto alare, e dovevano sopportare carichi enormi durante ogni fase del volo.
La movimentazione era affidata a due potenti attuatori idraulici a vite geometrica alimentati dai sistemi principali del velivolo. La sicurezza del sistema era garantita da un collegamento meccanico che sincronizzava perfettamente i due lati. Se una delle ali avesse subito un blocco o una perdita di funzionalità, anche l’altra si sarebbe arrestata immediatamente. Una scelta progettuale apparentemente drastica ma indispensabile per evitare asimmetrie che avrebbero potuto portare alla perdita del controllo dell’aeromobile.
Foto:USNavy – clicca per ingrandire
Il CADC: il computer che governava l’aerodinamica
A controllare l’intero sistema interveniva il Central Air Data Computer, conosciuto con l’acronimo CADC. Oggi un computer del genere potrebbe sembrare rudimentale, ma all’inizio degli anni Settanta rappresentava una delle più avanzate applicazioni dell’elettronica digitale nel settore aeronautico.
Il CADC monitorava continuamente velocità, quota, densità dell’aria e angolo di attacco. Utilizzando questi dati, determinava automaticamente la posizione ideale delle ali per ogni condizione di volo. L’obiettivo non era soltanto ottenere la massima velocità, ma garantire il miglior equilibrio possibile tra portanza, resistenza aerodinamica, autonomia e manovrabilità.
I piloti disponevano comunque di un controllo manuale che permetteva di modificare la geometria alare per esigenze tattiche specifiche. In caso di avaria completa del sistema automatico o dei circuiti idraulici principali, era inoltre disponibile una procedura di emergenza che consentiva alle ali di tornare verso la posizione di 20 gradi sfruttando esclusivamente le forze aerodinamiche generate dal vento relativo, garantendo così la possibilità di effettuare un atterraggio in sicurezza.
Prestazioni operative e robustezza strutturale
L’insieme di queste soluzioni consentì al Tomcat di raggiungere prestazioni eccezionali per un velivolo imbarcato. La velocità massima superava Mach 2,34, mentre la quota operativa oltrepassava i 16.000 metri. Il limite strutturale di +9,5 G e -5,5 G testimonia la robustezza della cellula, progettata per sopportare anni di missioni ad alta intensità.
Anche l’autonomia rappresentava uno dei punti di forza del progetto. Grazie alla capacità di trasportare serbatoi esterni e alla notevole quantità di carburante interno, il raggio d’azione poteva raggiungere circa 3.000 chilometri, una caratteristica che avrebbe successivamente favorito la trasformazione del velivolo in una piattaforma d’attacco a lungo raggio.
AWG-9 e AIM-54 Phoenix: il sistema d’arma della Guerra Fredda
Se la geometria variabile costituiva il volto più visibile del Tomcat, il radar AN/AWG-9 rappresentava il suo vero cervello operativo. Progettato per affrontare la minaccia dei bombardieri sovietici armati di missili antinave, il sistema possedeva capacità che all’epoca apparivano quasi futuristiche.
Il radar era in grado di tracciare simultaneamente ventiquattro bersagli e guidare l’ingaggio di sei obiettivi contemporaneamente a distanze superiori ai 180 chilometri. Integrato con il missile AIM-54 Phoenix, l’F-14 divenne il primo caccia al mondo capace di creare una vera e propria barriera difensiva attorno a un gruppo navale.
L’armamento era completato dai missili AIM-7 Sparrow per il combattimento a medio raggio, dagli AIM-9 Sidewinder per gli scontri ravvicinati e dal collaudato cannone rotante M61 Vulcan da 20 mm integrato nel muso.
F-14A: il potenziale limitato dai TF30
La prima versione operativa, l’F-14A, introdusse tutte le innovazioni che avrebbero reso celebre il Tomcat, ma evidenziò anche il principale punto debole dell’intero progetto. I motori Pratt & Whitney TF30-P-412A e TF30-P-414A, derivati da un programma precedente, non erano stati concepiti per le manovre estreme richieste a un caccia da superiorità aerea.
Ogni propulsore sviluppava circa 54,9 kN di spinta a secco e 75,6 kN con postbruciatore. Sebbene questi valori fossero adeguati sulla carta, la loro risposta durante manovre aggressive ad elevato angolo di attacco risultava problematica. Gli episodi di stallo del compressore erano relativamente frequenti e potevano generare improvvise perdite di spinta, talvolta con conseguenze critiche.
L’avionica era incentrata sul radar AN/AWG-9 analogico e sui sistemi di guerra elettronica disponibili negli anni Settanta. Sotto il muso trovava posto anche il sistema Northrop TCS, una telecamera ad alta capacità di ingrandimento che permetteva l’identificazione visiva dei bersagli a grande distanza.
F-14B: la rivoluzione dei General Electric F110
La situazione cambiò radicalmente con l’introduzione dell’F-14B, inizialmente noto come F-14A Plus. La sostituzione dei TF30 con i General Electric F110-GE-400 rappresentò probabilmente il più importante miglioramento mai introdotto sul Tomcat.
Ogni nuovo motore sviluppava circa 73,9 kN di spinta a secco e oltre 120 kN con postbruciatore. L’aumento complessivo della spinta era nell’ordine del trenta per cento, ma il vero vantaggio risiedeva nell’affidabilità e nella resistenza agli stalli del compressore. Il Tomcat divenne finalmente il caccia che i progettisti Grumman avevano immaginato fin dall’inizio.
Le modifiche avioniche furono più contenute ma comunque importanti. I sistemi di allarme radar vennero aggiornati e il velivolo acquisì la possibilità di integrare il pod LANTIRN, aprendo la strada alla futura trasformazione in piattaforma d’attacco di precisione.
F-14D Super Tomcat: la digitalizzazione completa
Consegnato a partire dal 1990, l’F-14D rappresentò il punto più alto dell’evoluzione tecnica del programma. Pur mantenendo gli affidabili motori F110-GE-400, questa versione introdusse una completa revisione dell’elettronica di bordo.
Il radar AN/APG-71 sostituì il vecchio AWG-9, offrendo maggiore portata, superiori capacità ECCM e una migliore affidabilità operativa. Gli abitacoli vennero completamente riprogettati attorno a display multifunzione digitali, trasformando il Tomcat in una piattaforma pienamente compatibile con i moderni concetti di guerra elettronica.
Anche la sicurezza dell’equipaggio beneficiò di notevoli miglioramenti grazie all’adozione dei sedili eiettabili Martin-Baker NACES, mentre il sistema sensori integrava finalmente un accoppiamento tra TCS e IRST, consentendo la ricerca passiva dei bersagli senza emissioni radar.
La trasformazione in Bombcat e l’integrazione del LANTIRN
La vera rivoluzione operativa del Tomcat arrivò però a metà degli anni Novanta. Con la scomparsa della minaccia strategica sovietica, la US Navy iniziò a cercare nuovi impieghi per una piattaforma ancora estremamente valida. La risposta arrivò con l’integrazione del pod AN/AAQ-14 LANTIRN.
Per contenere i costi, la Marina decise di acquistare soltanto il pod di puntamento anziché l’intera suite prevista originariamente. L’installazione avvenne sulla stazione subalare destra 8B, preservando i punti d’attacco ventrali per armamenti e serbatoi supplementari.
L’aspetto più affascinante di questa trasformazione fu probabilmente la soluzione tecnica adottata dalla Grumman. Poiché l’architettura originale del Tomcat non disponeva della capacità di elaborazione necessaria per gestire il nuovo sistema, gli ingegneri integrarono un computer dedicato direttamente all’interno dell’adattatore del pilone. Una soluzione elegante che evitò costose modifiche all’intero velivolo.
Il ruolo del RIO e la nuova capacità d’attacco
La presenza del Radar Intercept Officer si rivelò decisiva nella trasformazione del Tomcat in bombardiere di precisione. Attraverso un monitor dedicato da cinque pollici, il RIO poteva osservare le immagini termiche del pod, individuare gli obiettivi, agganciarli e guidare le munizioni laser.
Questa suddivisione dei compiti consentiva al pilota di concentrarsi esclusivamente sulla condotta del volo e sulla sopravvivenza tattica del velivolo. Il risultato fu una piattaforma sorprendentemente efficace nelle missioni d’attacco, spesso superiore a velivoli più moderni sotto il profilo dell’autonomia e del carico bellico trasportabile.
Grazie al LANTIRN, il Tomcat acquisì la capacità di impiegare autonomamente le bombe a guida laser della famiglia Paveway, comprese le GBU-10, GBU-12, GBU-16 e GBU-24. Il sensore FLIR permetteva inoltre operazioni notturne e ognitempo, mentre la registrazione in tempo reale degli impatti consentiva una valutazione immediata dei danni inflitti al bersaglio.
Gli ultimi anni operativi e il ritiro dalla US Navy
Nei cieli della Bosnia, del Kosovo, dell’Afghanistan e dell’Iraq il Bombcat dimostrò quanto il progetto Grumman fosse ancora competitivo. La combinazione di autonomia, capacità di carico e precisione d’ingaggio ne fece una delle piattaforme preferite dagli equipaggi della US Navy durante gli anni Novanta e i primi anni Duemila.
Il ritiro ufficiale, avvenuto il 22 settembre 2006, non fu determinato da una mancanza di efficacia operativa. Le ragioni erano principalmente economiche e strategiche. La manutenzione di una macchina così complessa richiedeva risorse enormi, mentre la minaccia per la quale il velivolo era stato concepito era ormai scomparsa con la dissoluzione dell’Unione Sovietica. Senza i grandi bombardieri sovietici da intercettare e con la progressiva diffusione di piattaforme multiruolo più economiche, il Tomcat divenne sempre più difficile da giustificare dal punto di vista logistico.


Le ultime immagini di F-14B ormai a fine carriera (FOTO: USNavy)
L’eredità ingegneristica del Tomcat
Analizzando oggi la struttura del Tomcat attraverso i disegni tecnici originali, emerge chiaramente come questo velivolo rappresenti una delle massime espressioni dell’ingegneria aeronautica della Guerra Fredda. I giganteschi pivot in titanio, il sofisticato sistema di movimentazione alare, il CADC, il radar AWG-9 e la successiva trasformazione in Bombcat raccontano la storia di una macchina progettata per risolvere problemi che nessun altro caccia dell’epoca era in grado di affrontare contemporaneamente.
L’F-14 non fu semplicemente un intercettore navale. Fu una piattaforma costruita attorno a una serie di soluzioni tecniche audaci, spesso complesse e costose, ma capaci di garantire prestazioni eccezionali per oltre trent’anni di servizio operativo. Ancora oggi, a distanza di decenni dalla sua introduzione, continua a essere studiato come uno dei più affascinanti esempi di integrazione tra aerodinamica, meccanica strutturale e tecnologia avionica mai realizzati nell’aviazione militare.